Métodos numéricos 25/9/17
Repaso:
Sistemas lineales con más ecuaciones que incognitas, AKA “Sobredeterminados”
M ecuaciones
N incognitas
M>N
A*X=b
MxN
“De rango completo” es decir que el rango es N.
Estos sistemas suelen no tener solución. Habíamos visto que
si lo pensamos en 3D, las soluciones posibles se nos presentan en un plano, que
puede o no tener el punto solución deseado.
Lo mas probable es que un punto dado no esté en el plano de
la imagen.
Como alternativa frente a este problema de inexistencia de
una solución exacta de X que cumpla AX=b, se busca acercarse al punto de la
imagen que menos difiera del plano de imagen.
Esto se logra con la técnica de cuadrados mínimos.
Se busca un Xcm tal que ||AXcm-b|| sea mínimo ->0.
Prop: La solución de cuadrados mínimos de AX=b coincide con
la solución exacta de (A’A)X=A’b
Por lo tanto usamos esta proposición para encontrar la mejor
solución Xcm al problema.
(A’A)X=A’b
Xcm=(A’A)^(-1)*A’*b
>>Xcm=resolver_chol(A’A,A’b);
(A’A) es simétrica y definida
positiva. Podemos y deberíamos usar cholesky para resolver este tipo de
sistemas.
Resulta que sistemas sobredeterminados, no se puede usar la propiedad
A^(-1) *A = I
A*A^(-1) = I
Defino Pseudo Inversa
Izquierda::
A^(-1) izq = (A’A)^(-1)*A’
A^(-1) izq*A=I
PERO
A* A^(-1) izq no es igual a I, por mas que su dimencion es
mxm.
[2 -1 3;3 1 5; 6 1 2;-1 0 8]
A_1_izq=((A'*A)^(-1))*A'
Ejemplos:
>> A=[2 -1 3;3 1 5; 6 1 2;-1 0 8];
>> A_1_izq=((A'*A)^(-1))*A'
A_1_izq =
0.1167 0.0023
0.1143 -0.0738
-0.6401 0.2778
0.0821 0.0459
0.0259 0.0376
-0.0116 0.0947
>> A_1_izq*A
ans =
1.0000 0.0000
-0.0000
-0.0000 1.0000
0.0000
-0.0000 0.0000
1.0000
>> pinv(A)
ans =
0.1167 0.0023
0.1143 -0.0738
-0.6401 0.2778
0.0821 0.0459
0.0259 0.0376
-0.0116 0.0947
>> pinv(A)*A
ans =
1.0000 -0.0000
-0.0000
-0.0000 1.0000
0.0000
0.0000 0.0000
1.0000
>>
Resuelve_chol(A’A,A’b)
es lo mismo que usar pinv(A)*b
Ejercicios:
1)
Dado el sistema:
2X1 + 3X2 – X3 = 7
-X1 +X2 +X3 =1.8
3X1 +X2 +X3=2.5
-X1 –X2 -2X3=2
2X1+X2+X3=1.2
I)
Hallar Xcm la solución de cm con
a.
Cholesky
b.
Pinv
Y constatar que coinciden
II)
Comparar AXcm con b
III)
Hallar el error relativo de ||AXcm-b||/||b||
IV)
Generar 1 millon al azar de vectores (X1 X2 X3)
y comprobar que ||AX-b||>=||AXcm-b||
V)
Verificar que pinv(A)*A=I3 pero A*pinv no es I
2)
Tomar
A=randn(2000,1500);
B=randn(2000,1);
Hallar Xcm y calcular error relativo
i)
Con Cholesky
ii)
Con pinv
iii)
Verificar si coinciden y hallar el tiempo de
ejecución.
1)
I)
>> A=[1 3 -3; -1 1 1; 3 1 1;-1 -1 -2;2 1 1];
>> b=[7;1.8;2.5;2;1.2];
>> Xchol=resuelve_chol(A'*A,A'*b);
>> Xpinv=pinv(A)*b;
II)
>> A*Xchol
ans =
7.3148
0.2586
1.3390
0.1110
1.0689
>> A*Xpinv
ans =
7.3148
0.2586
1.3390
0.1110
1.0689
>> b
b =
7.0000
1.8000
2.5000
2.0000
1.2000
III)
>> norm(A*Xchol-b)/norm(b)
ans =
0.3404
>> norm(A*Xpinv-b)/norm(b)
ans =
0.3404
IV)
>> cont=0;
>> for k=1:1000000
Xrand=randn(3,1);
if norm(A*Xrand-b)<norm(A*Xchol-b)
cont=1;
end
end
>> cont
cont =
0
V)
>> pinv(A)*A
ans =
1.0000 0.0000
-0.0000
0.0000 1.0000
0.0000
-0.0000 0.0000
1.0000
>> A*pinv(A)
ans =
0.9850 0.0650
0.0305 0.0897 0.0391
0.0650 0.6791
-0.2478 -0.3899 -0.0161
0.0305 -0.2478
0.5917 -0.1829 0.3818
0.0897 -0.3899
-0.1829 0.4618 -0.2346
0.0391 -0.0161
0.3818 -0.2346 0.2823
2)
>> A=randn(2000,1500);
>> b=randn(2000,1);
>> tic
Xchol=resuelve_chol(A'*A,A'*b);
norm(A*Xchol-b)/norm(b)
toc
ans =
0.5002
Elapsed time is 0.238292 seconds.
>> tic
Xpinv=pinv(A)*b;
norm(A*Xpinv-b)/norm(b)
toc
ans =
0.5002
Elapsed time is 35.292501 seconds.
>>
Tema de aplicación: Ajuste de parámetros con cuadrados mínimos.
Tendremos una serie de datos apareados (Xn,Yn) y buscaremos una función que explique los datos, para predecirlos.
Nosotros trabajaremos con funciones simples, conocidas, por ejemplo F(X)= 5 sen(X) + 2X
En general, serán funciones del tipo F(X)=L1F2 + L2F2 + … + LnFn con L coeficiente, F función simple conocida, y n un número lo menor posible para encontrar soluciones sensillas.
Generalmente ya conoceremos los Fs a los que intentaremos ajustar la función, por lo que el ejercicio será encontrar los L tal que la función compuesta de Fs se asemeje lo más posible a los datos.
Por ejemplo, F(X)=L1 sen(X) + L2 X
Buscaremos encontrar los valores L1 y L2 que más se asemejen a la serie de datos empíricos que son dados.
Matricialmente se puede expresar:
| F1(X1) F2(X1) … Fn(X1) | | L1 | | Y1 |
| F1(X2) F2(X2) … Fn(X2) | | L2 | = | Y2 |
| … ….. ….. .. …. | | …. |
| F1(Xm) F2(Xm) … Fn(Xm) || Lm| | Ym |
Si A es la matriz de Fs, L es la matriz de Ls, Y es la matriz de soluciones
A*L=Y
Ejemplo:
>> X=[0;1;2;4;7];
>> Y=[0.48;1.52;6.6;29;90.5];
>> plot(X,Y,'*')
>>
Podríamos aproximar los puntos por distintas funciones, los datos parecen presentar un comportamiento cuadrático, pero cual función cuadrática se acerca mejor?
Usemos la técnica de cuadrádos mínimos para encontrar cual de todas las
F(X)=L1X^2 + L2X + L3
Mejor se ajusta a los datos de la tabla.
Entonces, estamos asumiendo que es cuadrática, es decir estamos fijando los parametros F de la matriz A, la función genérica planteada hace un rato, y estamos buscando los parámetros L tal que el ajúste por cuadrádos mínimos de un error relativo mínimo.
Planteamos entonces A=[X.^2 X X.^0]
(X.^2 X X.^0) (L)=(Y)
Y la solución:
L=pinv(A)*Y
L=pinv(A)*Y
L=resuelve_chol(A’*A,A’*Y)
En Matlab:
>> A=[X.^2 X X.^0];
>> L=pinv(A)*Y
L =
1.9279
-0.6038
0.3201
>> L=resuelve_chol(A'*A,A'*Y)
L =
1.9279
-0.6038
0.3201
>> L=pinv(A)*Y
L =
1.9279
-0.6038
0.3201
>> L=resuelve_chol(A'*A,A'*Y)
L =
1.9279
-0.6038
0.3201
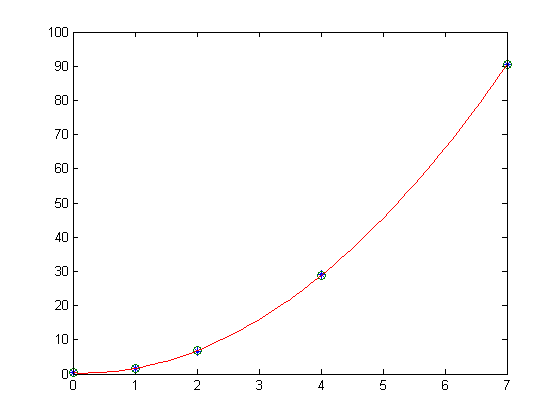
>> f=@(X)L(1)*X.^2+L(2)*X+L(3);
>> plot(X,Y,'*',X,f(X),'O',0:0.1:7,f(0:0.1:7))
Proposición:
Busquemos ajustar los mismos datos por una lineal. Como queda? Cual es el error?
B1*X B2*1=Y
Buscar B1 y B2, y hallar el error relativo.
Luego hacer lo mismo con una polinómica grado 3.
1)
>> A=[X.^1 X.^0];
>> B=pinv(A)*Y;
>> f=@(X)B(1)*X+B(2);
>> norm(A*B-Y)/norm(Y)
ans =
0.2241
>> plot(X,Y,'*',X,f(X),'O',0:0.1:7,f(0:0.1:7))
>> B
B =
13.1669
-11.2473
B =
13.1669
-11.2473

2)
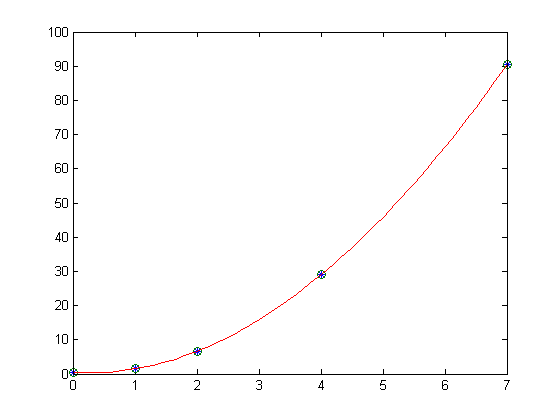
>> A=[X.^3 X.^2 X.^1 X.^0];
>> C=pinv(A)*Y;
>> f=@(X)C(1)*X.^3 +C(2)*X.^2+C(3)*X+C(4);
>> norm(A*C-Y)/norm(Y)
ans =
6.7189e-004
>> plot(X,Y,'*',X,f(X),'O',0:0.1:7,f(0:0.1:7))
>> C
C =
-0.0227
2.1615
-1.1590
0.4946
C =
-0.0227
2.1615
-1.1590
0.4946
No comments:
Post a Comment